1 中国科学院安徽光学精密机械研究所中国科学院大气光学重点实验室,安徽 合肥 230031
2 中国科学技术大学,安徽 合肥 230031
3 先进激光技术安徽省实验室,安徽 合肥 230037
研制出一种可以在船载平台下完成气溶胶测量的太阳光度计。仪器采用两段式图像跟踪方法,首先利用鱼眼成像系统对太阳进行粗跟踪,之后通过精跟踪成像系统来提高跟踪精度,并阐述了二维转台、图像跟踪系统、测量光路的工作流程。利用船载平台太阳光度计在渤海湾进行长期观测,渤海湾日平均气溶胶光学厚度多集中在0.1~0.3范围内,大气较为洁净,且夏季大气以细粒子为主,而深秋大粒子占据主导地位。将所得结果与日本POM-01 MKⅢ船用太阳光度计的测量结果进行对比,发现气溶胶光学厚度日变化趋势基本相近,决定系数可达到0.968,其平均相对测量误差为4.83%,?ngstr?m 指数平均相对测量误差为2.55%。所得结果验证了船载太阳光度计的可靠性与稳定性,并且可以进一步利用可见光到近红外的辐射信息反演其他大气参数的光学特性。
大气光学 气溶胶 太阳光度计 船载平台 渤海湾
红外与激光工程
2022, 51(9): 20210824
1 天津航海仪器研究所, 天津 300131
2 海装北京局驻天津地区第一军事代表室, 天津 300131
3 中国人民解放军92730部队, 天津 300131
载体机动时, 低精度航姿系统无法准确敏感重力矢量, 由加速度计输出计算的水平姿态误差较大。为了减弱运动加速度的影响, 提高机动状态下水平姿态估计精度,提出一种自适应卡尔曼滤波水平姿态估计算法。以姿态四元数和陀螺漂移为状态量, 四元数姿态更新微分方程为状态方程, 加速度计输出为量测量建立伪量测方程。根据加速度计量测更新残差对量测噪声方差阵进行实时估计和动态调节, 较好地解决了机动状态下航姿系统水平姿态估计问题, 提高了水平姿态估计精度。跑车试验验证了算法的有效性。
航姿系统 水平姿态估计 机动加速度 卡尔曼滤波 AHRS horizontal attitude estimation maneuvering acceleration Kalman filter
初始的光学隐蔽深度模型(OCD)是在海水光学性质均匀的条件下建立的,针对光学性质均匀水体假定条件下的光学隐蔽深度模型缺乏普适性的缺点,基于海水中对比度传输方程,在垂向方向上把海水划分为多个光学性质相似的均匀层,并依此建立非均匀海水条件下光学隐蔽深度(OCD_LAYER)模型。计算并分析了观测天顶角、海水体衰减系数和潜器表面反射率对非均匀海水条件下光学隐蔽深度模型的影响。使用潜模和光学隐蔽深度测量系统在近岸完成模型的实验验证和效果分析。使用3 m水柱漫衰减系数均值,OCD模型的平均均方根误差为1.19 m,平均绝对误差为1.19 m,平均相对误差为48.77%,OCD_LAYER模型的平均均方根误差为1.05 m,平均绝对误差为0.89 m,平均相对误差为36.18%。实验结果表明,OCD_LAYER模型准确性更高,误差更低,结果更可靠。
海洋光学 光学隐蔽深度 非均匀海水 对比度 光学学报
2018, 38(10): 1001003
1 海军潜艇学院, 山东 青岛 266000
2 中国人民解放军61741部队, 北京 100094
3 中国海洋大学信息科学与工程学院, 山东 青岛 266000
为采用卫星遥感数据反演的方法获取水下潜行器的光学隐蔽深度,实现时间和空间上大范围、大尺度的测量,为水下航行器搭载的光学隐蔽深度测量装置提供新的校验途径,提出了一种基于准分析算法的光学隐蔽深度卫星反演方法。根据光学隐蔽深度模型,使用Aqua-MODIS以及Terra-MODIS卫星的日网格化遥感反射比数据,先对数据进行预处理,完成遥感反射比数据的质量控制和Aqua、Terra卫星数据的交叉校准,再根据准分析算法和Doron算法建立卫星反演光学隐蔽深度模型,制作特定海区光学隐蔽深度融合产品。在模型中输入443,488,555 nm波段的遥感反射比数据,数据等级为L3m,空间分辨率为4 km,数据的经度范围为100°E~125°E,纬度范围为10°N~38°N。结果表明:基于准分析算法的光学隐蔽深度卫星反演技术路径可行,开拓了光学隐蔽深度获取的新方式,为水下光学隐蔽深度测量装置提供了校验方法,并为水下光学隐蔽深度相关探测与反探测等**应用提供了重要的理论支撑。
遥感 光学隐蔽深度 准分析算法 卫星反演 辐照度 激光与光电子学进展
2018, 55(8): 080104
1 海军潜艇学院,山东 青岛 266000
2 中国人民解放军92763部队,辽宁 大连 116000
为实现水下对航行器光学探测,研究了水下环境光学特性测量机理,确立了海洋下行辐射、海洋上行辐射测量方法。在分析海洋下行辐射分布规律的基础上,简化了海洋下行辐射模型,建立了Janus海洋下行辐照度测量模型,设计了辐照度光学探头,确定了海洋上行辐射测量方法,并完成光学探头的响应度定标设计。分析表明,下行辐照度由标量辐照度、散射系数、体积衰减系数和漫衰减系数共同决定,均匀角分布入射辐射率,当入射角小于70°时,余弦误差小于5%,采用的Janus设计优化了海洋下行辐照度的测量。海洋下行辐射、海洋上行辐射测量方法的建立,为水下实现目标环境光学特性测量奠定了技术理论支撑。
环境光学特性 测量方法 辐照度 辐射率 environmental optical properties measuring method irradiance radiation rate
为了保障航行器水下航行时对可见光波段光学隐蔽的需求, 以及实时测量其所在位置的光学隐蔽深度, 设计了小型化可见光波段的光学隐蔽深度测量系统。根据光学隐蔽深度模型, 优化设计了海水上行辐照度、海水下行辐照度、海水漫衰减系数、海水体衰减系数的测量方法。优化设计后的系统有21个测量通道, 测量光谱为390~667 nm, 工作深度可达50 m。进行了海上试验, 试验结果显示: 在天气良好的条件下, 水下航行器在520~560 nm可见光波段内存在暴露窗口, 同时测得特征长度为0.75 m的模型的光学隐蔽深度为3.5 m。得到的结果表明, 设计的小型化可见光波段光学隐蔽深度测量系统可以实现光学隐蔽深度的测量, 测量装置具有体积小、重量轻、系统性能稳定等优点, 适用于水下航行器搭载, 可为下一步实现可自主升降的光学隐蔽深度测量系统设计提供理论技术支撑。
水下航行器 光学隐蔽深度测量系统 小型化设计 可见光波段 underwater vehicle optical concealment depth measuring system miniaturization design visible light band
Author Affiliations
Abstract
1 State Key Laboratory of Luminescent Materials and Devices (SKLLMD), South China University of Technology, Guangzhou 510640, China
2 Department of Chemistry, National University of Singapore, 117543, Singapore
3 NUSNNI-NanoCore, National University of Singapore, 117576, Singapore
4 e-mail: msxfjiang@scut.edu.cn
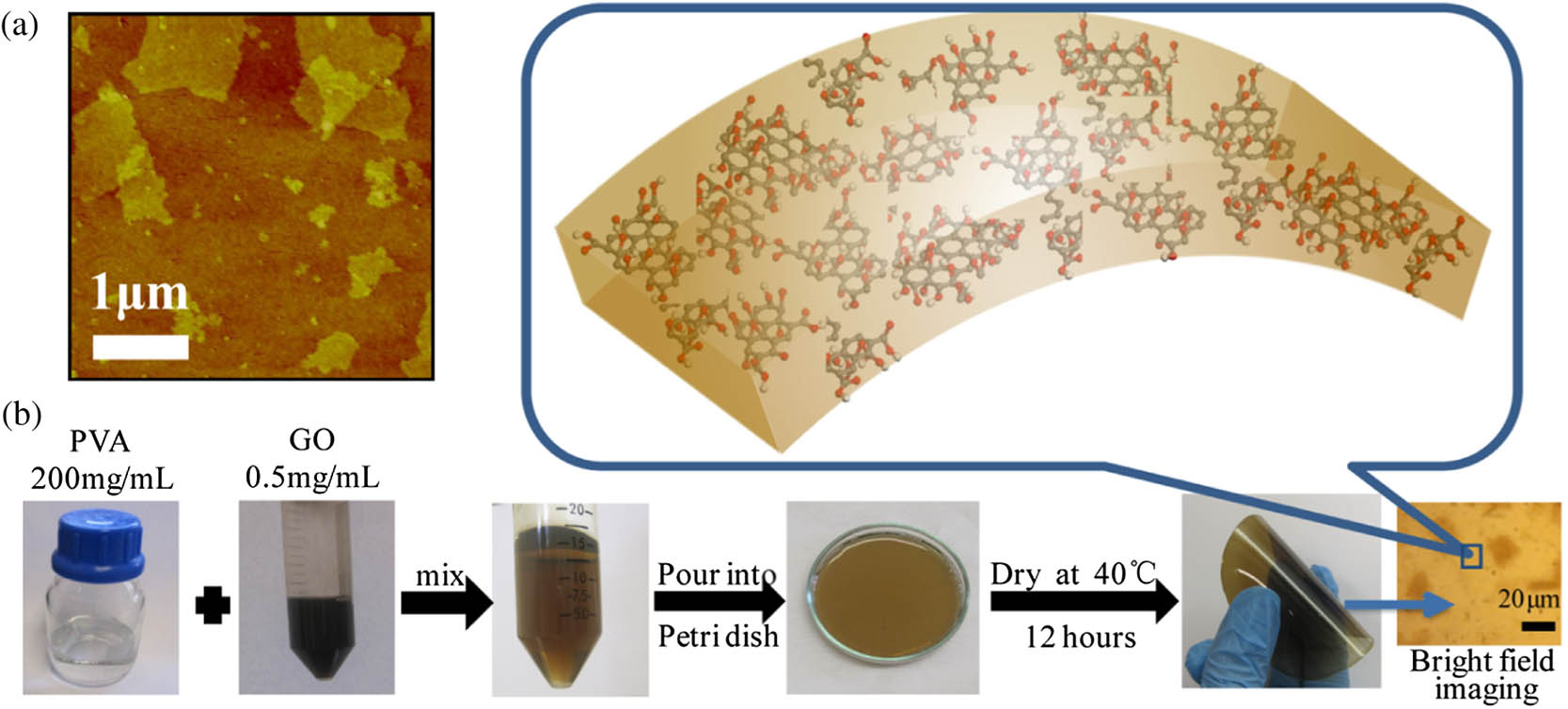
We report a simple solution-processed method for the fabrication of low-cost, flexible optical limiting materials based on graphene oxide (GO) impregnated polyvinyl alcohol (PVA) sheets. Such GO–PVA composite sheets display highly efficient broadband optical limiting activities for femtosecond laser pulses at 400, 800, and 1400 nm with very low limiting thresholds. Femtosecond pump–probe measurement results revealed that nonlinear absorption played an important role for the observed optical limiting activities. High flexibility and efficient optical limiting activities of these materials allow these composite sheets to be attached to nonplanar optical sensors in order to protect them from light-induced damage.
Thin films, optical properties Nonlinear optical materials Ultrafast nonlinear optics Spectroscopy, time-resolved Photonics Research
2015, 3(3): 03000A87
1 海军潜艇学院,山东 青岛 266000
2 中国海洋大学 信息科学与工程学院,山东 青岛 266000
3 青岛市光电工程技术研究院,山东 青岛 266000
为了实现对水下航行器光学隐蔽深度的实时测量,研制了水下航行器光学隐蔽深度测量系统。根据目标背景对比度的传输理论,分析了目标背景对比度在海水、大气、海面的传输特性,建立了水下航行器光学隐蔽深度模型。基于该模型分析了测量水下航行器光学隐蔽深度所需要的参数,设计了测量海水上行辐照度、海水下行辐照度、海水体衰减性系数、海水漫衰减性系数和水下航行器表面反射率的测量方法,并完成一次海上试验。试验测得良好天气情况下特征尺度为12 m的水下航行器的光学隐蔽深度为25~35 m。试验结果表明,设计的测量系统可以实现对水下航行器光学隐蔽深度测量,并适用于各类潜艇。由于改变了传统的在水面进行深度测量的方式,该系统工作稳定可靠,提高了隐蔽性和对海域测量的准度,可为水下作战决策提供帮助。
光学隐蔽深度测量 水下航行器 目标背景 对比度 optical measurement of concealment depth underwater vehicle object background contrast ratio 光学 精密工程
2015, 23(10): 2778
1 海军潜艇学院,山东 青岛 266044
2 中国科学院海洋环流与波动重点实验室,山东 青岛 266071
3 中国科学院研究生院,北京 100049
基于天空光偏振特征的天文导航方式是最近发展起来的一种自动天文导航方式,其定位能力直接决定了它的发展应用价值.针对舰船偏振光天文导航方式,从天空光偏振角的探测模型和单天体天文定位的船位误差模型出发,建立了偏振光天文导航的误差模型.利用该模型,仿真计算分析了偏振光天文导航的定位能力.分析表明:当太阳位于探测装置的正横方向且天顶角较大时,探测到的天空光偏振角对太阳方向的变化最敏感,最有利于偏振光天文导航;当偏振角的测角准确度达到角分水平时,偏振光天文导航方式的自动定位准确度可达海里级,可用于辅助惯性导航.
偏振 天空光 天文导航 惯性导航 Polarization Skylight Celestial navigation INS









